¶ Information
- Titre : Extraction de l'orientation 3D à partir de données de microscopie par nappe de lumière
- Type de projet : Stage de recherche BRPC
- Stagiaire : Étienne Comtois (Baccalauréat en Informatique et Génie Logiciel, UQAM)
- Durée : 16 semaines (Été 2023)
- Financement : Bourse de recherche BRPC (CRSNG), Supplément FRQNT, Projet Arbrenville
¶ Résumé du projet
Les villes et sociétés d'État sont confrontées à des défis croissants en matière de planification urbaine et de préservation de la biodiversité, notamment dans le contexte des changements climatiques. La forêt urbaine joue un rôle crucial dans la résilience des écosystèmes urbains, mais son suivi et sa caractérisation demeurent complexes, en particulier pour les arbres situés en domaine privé. Ce projet vise à combler cette lacune en proposant une méthode novatrice de caractérisation automatisée des arbres en milieu urbain, en utilisant des drones aériens et des technologies d'apprentissage machine.
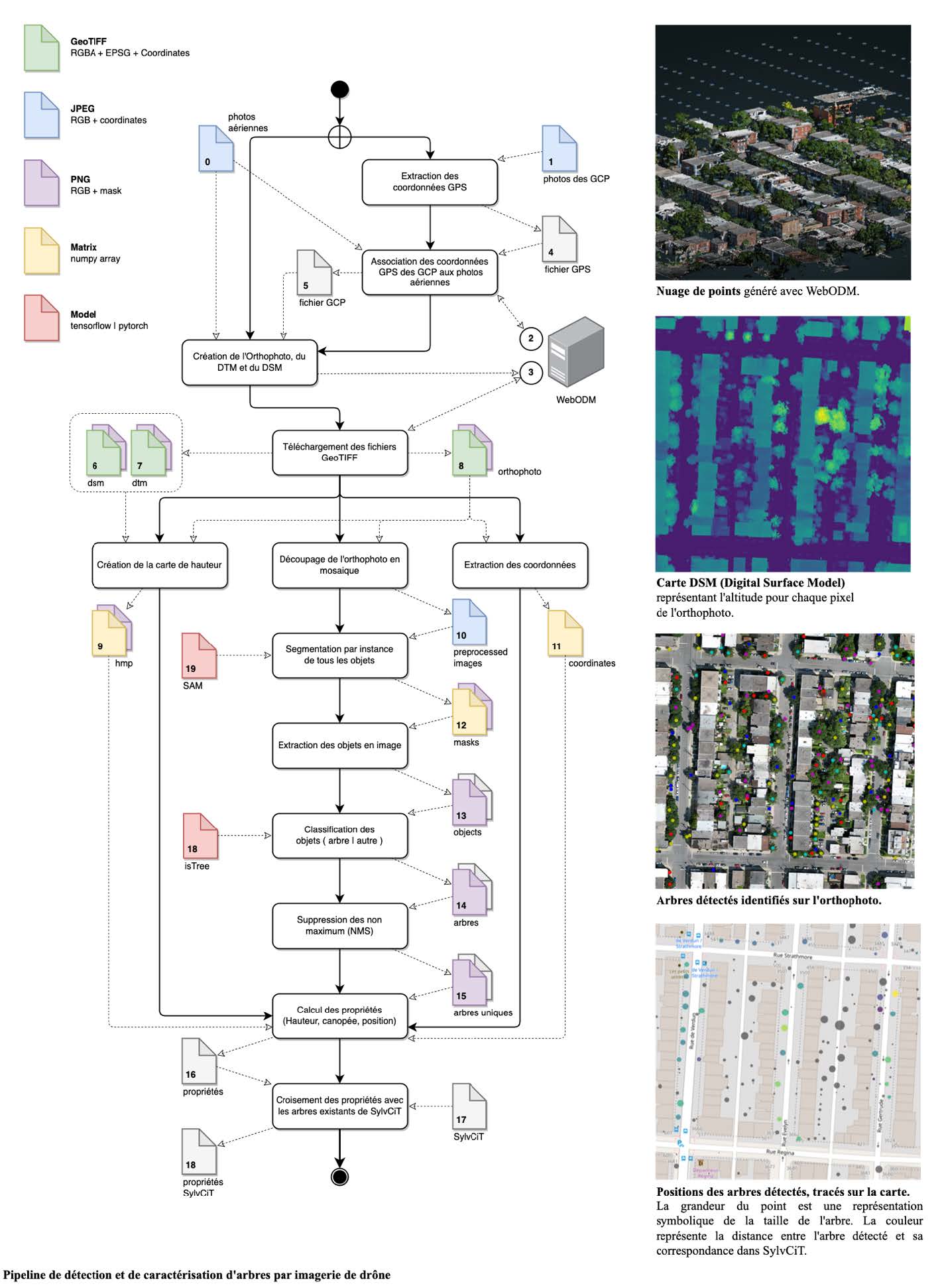
La méthodologie repose sur l'acquisition de données géospatiales précises et actualisées grâce à l'utilisation d'un drone DJI Mini 3 pro (M3P). Les relevés aériens fournissent des images haute résolution qui sont ensuite traitées pour générer des orthophotos géoréférencées. Un modèle d'apprentissage machine personnalisé, nommé isTree, permet la classification automatique des arbres à partir d'images segmentées.
L'approche proposée comprend plusieurs étapes clés. Tout d'abord, les images aériennes sont traitées avec WebODM, une solution open-source de reconstruction 3D, pour générer des orthophotos géoréférencées et des modèles numériques de surface (DSM) et de terrain (DTM). Ensuite, l'outil Segment Anything (SAM) est utilisé pour segmenter les objets de l'orthophoto, permettant ainsi d'obtenir des masques d'instance pour chaque objet détecté. Le modèle isTree est ensuite formé à partir de ces masques, permettant la classification automatique des arbres. Une précision de 88.1% est atteinte à la suite d’une étape de suppression des duplicatas et des trop petits arbres.
Les résultats obtenus démontrent l'efficacité et la viabilité de la méthodologie proposée. Le pipeline automatisé permet d'obtenir des informations précises telles que la géolocalisation des arbres, la superficie de leur canopée et leur hauteur. Ces données sont cruciales pour une planification urbaine plus éclairée et la gestion durable de la biodiversité en milieu urbain. De plus, l'utilisation de drones offre une solution économique et efficiente pour relever les arbres en domaine privé, éliminant ainsi le besoin de relevés manuels fastidieux.
Ce projet ouvre de nouvelles perspectives pour la cartographie et la caractérisation des arbres en milieu urbain. Les données générées pourront être intégrées dans des jumeaux numériques de la ville, facilitant ainsi la prise de décisions informées en matière de planification urbaine. L'intégration future de ces données dans le projet SylvCiT, une référence en matière de suivi des arbres en domaine public, permettra d'offrir les données nécessaires aux chercheurs pour faire des simulations et analyses environnementales. À l'avenir, des améliorations continues du pipeline automatisé et du modèle de classification pourraient contribuer à une caractérisation encore plus précise et à une meilleure gestion des arbres en milieu urbain.
¶ Remarque personnelle
Ce projet m'a permis d'affirmer et de développer mes connaissances et mes compétences en informatique, plus précisément en vision par ordinateur et en apprentissage machine. Ce fut un plaisir pour moi de développer un projet qui a le potentiel d'aider à l'amélioration de la qualité de vie dans nos villes. Le projet est disponible sur le dépôt GitHub du LINUM https://github.com/linum-uqam/stage-etienne-comtois.
¶ Résumé graphique